Od początku roku szkolnego, co tydzień w poniedziałki odbywały się u nas zajęcia z robotyki, które prowadził nasz uczeń klasy 3D, Mateusz Antkiewicz. Regularnie uczęszczała na nie grupa pięciu wytrwałych uczniów z pasją do tworzenia i nauki.
Uczestnicy uczyli się elektroniki, programowania i szeroko rozumianej robotyki realizując małe projekty, gdzie każdy kolejny był budowany w oparciu o wiedzę zdobytą z poprzednich projektów. Takie podejście ułatwiało zrozumienie powiązań między różnymi zagadnieniami i pokazywało, że każde, nawet pozornie skomplikowane urządzenia są tak naprawdę złożone z wielu prostszych podsystemów, które osobno można pojąć. Dlatego też, poprzez udział w zajęciach, uczniowie nabierali inżynieryjnego podejścia do rozwiązywania problemów.
Tutaj chcieliśmy pokazać i omówić co jak dotąd osiągnęliśmy po niemal całym roku szkolnym regularnej pracy na naszym kółku robotycznym:
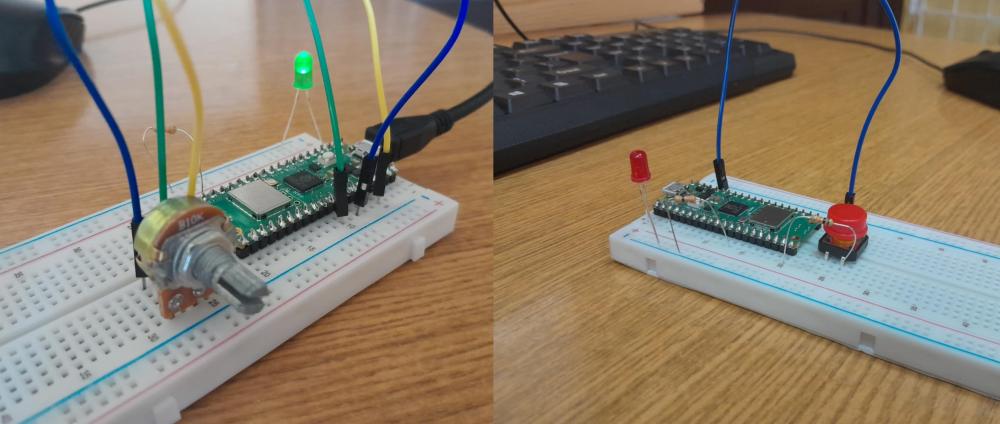
Zaczęło się od poznawania prostych praw fizyki którymi rządzą się obwody elektroniczne, posługiwania się płytkami stykowymi i pasującymi do nich kabelkami, oraz obsługiwania programowalnych mikrokontrolerów Raspberry Pi Pico W. Pierwszym projektem było zwykłe zaświecenie i gaszenie diody LED, co później połączyliśmy z guzikami lub potencjometrami, gdy poznaliśmy jak się ich używa (pokazane w zdjęciach poniżej). Te dwie rzeczy pokazały jak wysyłać sygnały analogowe i cyfrowe z mikrokontrolera (zapalanie/gaszenie diody LED), oraz jak je odczytywać (użycie guzika i potencjometra).
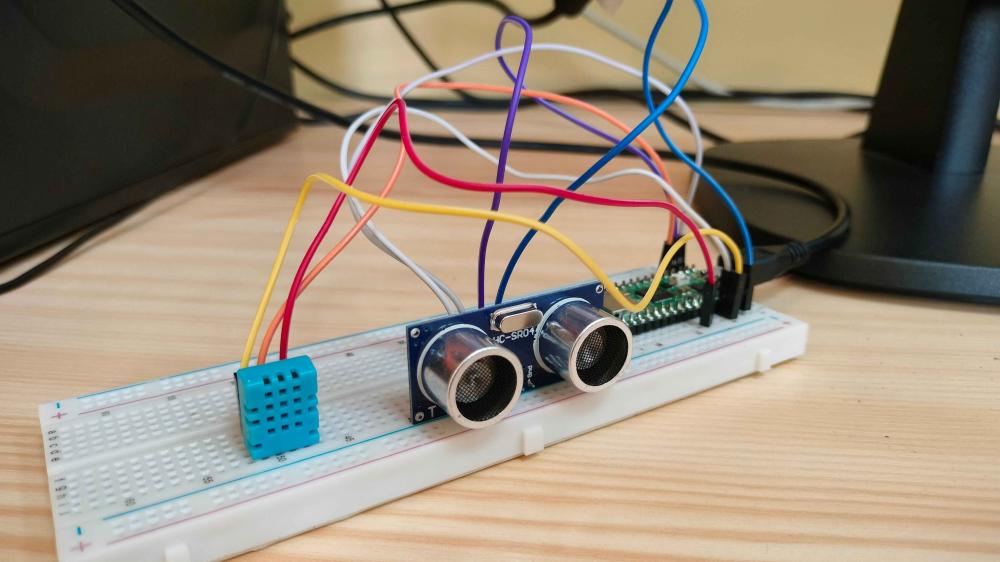
Z tymi podstawami można już łatwo poznawać dalsze protokoły i urządzenia. Między innymi były to: PWM do sterowania silnikami i sterowania jasnością diody LED, sterowniki silników szczotkowych, I2C do obsługi cyfrowych komponentów t.j. wyświetlacz LCD, czujnik temperatury DHT11, czujnik odległości HC-SR04 (oba pokazane na zdjęciach), odbiornik podczerwieni TSOP4838, stabilizatory napięcia i wiele ciekawych jeszcze przed nami…
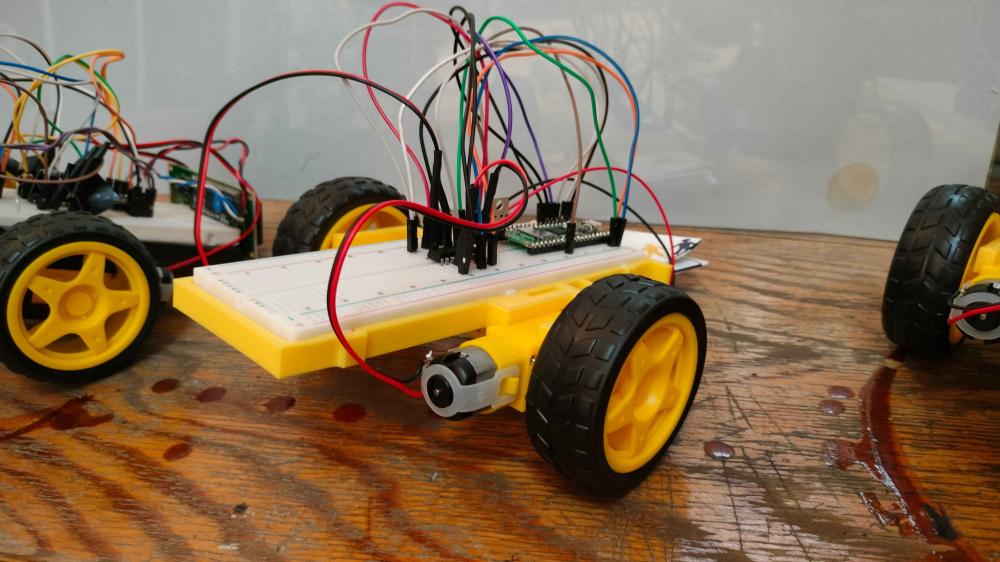
Te wszystkie poznane zagadnienia, urządzenia i protokoły posłużyły do rozpoczęcia większego projektu, którym był i wciąż jest robot poruszający się na dwóch kołach. Dzięki naszej szkolnej drukarce 3D mogliśmy zrobić ramę, idealnie pasującą do części, które posiadamy i mamy możliwość drukowania więcej takich ram, jeśli będzie trzeba coś zmienić lub jeśli coś się popsuje. (rama i robot pokazane w zdjęciach poniżej)
Porusza się on trochę jak czołg, tylko, że zamiast gąsienic ma koła, więc trzyma balans opierając się koszykiem na baterię o podłogę. Można to tak porównać, bo gdy lewe koło kręci się do przodu to skręca w prawo, natomiast, gdy prawe koło kręci się do przodu to skręca w lewo. Oczywiście wiadomo, że gdy oba koła kręcą się do przodu to jedzie do przodu ;)
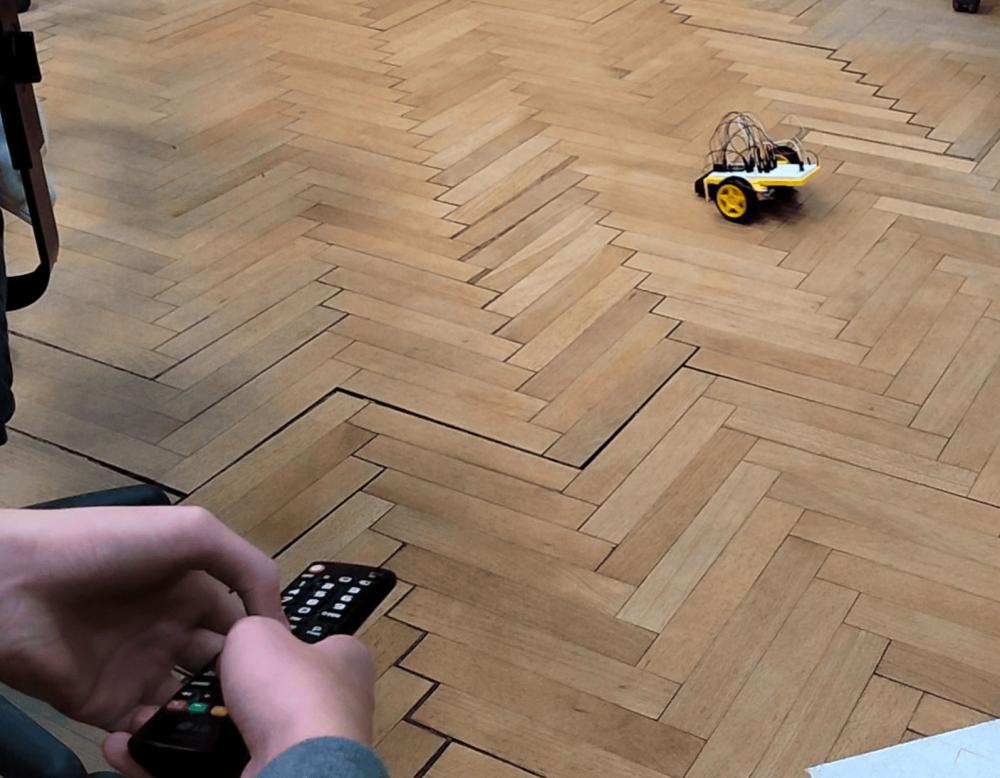
Mieliśmy już okazję go wykorzystać razem z odbiornikami podczerwieni, aby sterować nim przy użyciu zwykłego pilota do telewizora co widać na jednym ze zdjęć.
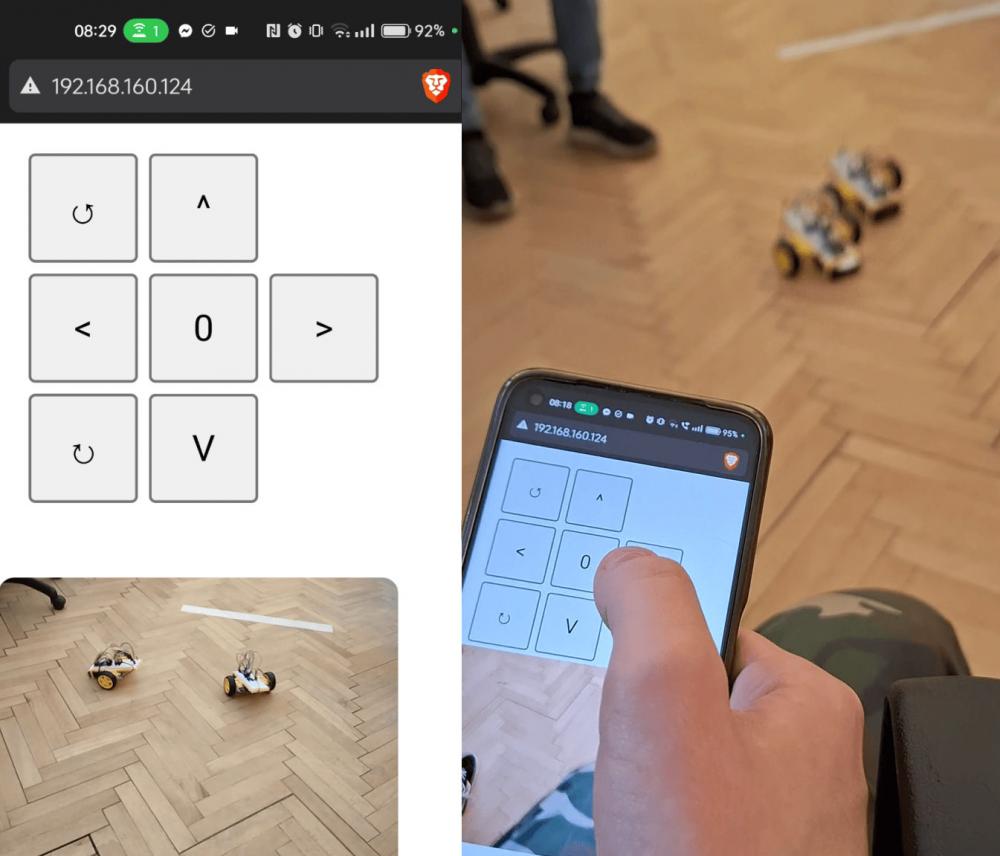
Najnowsze dokonanie to możliwość sterowania tym robotem poprzez Wi-Fi. Wykorzystaliśmy możliwości mikrokontrolera do sterowania nim z telefonu, a dokładniej poprzez udostępnienie z telefonu hot-spota z którym łączy się robot. Po połączeniu wystarczy w przeglądarce wpisać lokalny adres IP połączonego robota i wyświetla się prosty interfejs z guzikami do sterowania robotem. Dzięki temu nie trzeba być w zasięgu jakiejkolwiek innej sieci by móc nim sterować, wystarczy żeby robot był w obrębie kilkunastu metrów od telefonu.
Z takimi możliwościami mogliśmy przeprowadzić naszą pierwszą “walkę robotów”, która niespodziewanie zakończyła się odpadnięciem koła jednego z robotów (Widać na załączonym zdjęciu). Wystarczyło tylko włożyć je z powrotem i znów wszystko działało.
Zajęcia będą kontynuowane również w przyszłym roku i mamy nadzieję, że odkryjemy jeszcze więcej pasjonatów robotyki!
Jeśli ciekawi was więcej, to warto się zapoznać z filmem promocyjnym koła:
Uczestnicy uczyli się elektroniki, programowania i szeroko rozumianej robotyki realizując małe projekty, gdzie każdy kolejny był budowany w oparciu o wiedzę zdobytą z poprzednich projektów. Takie podejście ułatwiało zrozumienie powiązań między różnymi zagadnieniami i pokazywało, że każde, nawet pozornie skomplikowane urządzenia są tak naprawdę złożone z wielu prostszych podsystemów, które osobno można pojąć. Dlatego też, poprzez udział w zajęciach, uczniowie nabierali inżynieryjnego podejścia do rozwiązywania problemów.
Tutaj chcieliśmy pokazać i omówić co jak dotąd osiągnęliśmy po niemal całym roku szkolnym regularnej pracy na naszym kółku robotycznym:
Zaczęło się od poznawania prostych praw fizyki którymi rządzą się obwody elektroniczne, posługiwania się płytkami stykowymi i pasującymi do nich kabelkami, oraz obsługiwania programowalnych mikrokontrolerów Raspberry Pi Pico W. Pierwszym projektem było zwykłe zaświecenie i gaszenie diody LED, co później połączyliśmy z guzikami lub potencjometrami, gdy poznaliśmy jak się ich używa (pokazane w zdjęciach poniżej). Te dwie rzeczy pokazały jak wysyłać sygnały analogowe i cyfrowe z mikrokontrolera (zapalanie/gaszenie diody LED), oraz jak je odczytywać (użycie guzika i potencjometra).
Z tymi podstawami można już łatwo poznawać dalsze protokoły i urządzenia. Między innymi były to: PWM do sterowania silnikami i sterowania jasnością diody LED, sterowniki silników szczotkowych, I2C do obsługi cyfrowych komponentów t.j. wyświetlacz LCD, czujnik temperatury DHT11, czujnik odległości HC-SR04 (oba pokazane na zdjęciach), odbiornik podczerwieni TSOP4838, stabilizatory napięcia i wiele ciekawych jeszcze przed nami…
Te wszystkie poznane zagadnienia, urządzenia i protokoły posłużyły do rozpoczęcia większego projektu, którym był i wciąż jest robot poruszający się na dwóch kołach. Dzięki naszej szkolnej drukarce 3D mogliśmy zrobić ramę, idealnie pasującą do części, które posiadamy i mamy możliwość drukowania więcej takich ram, jeśli będzie trzeba coś zmienić lub jeśli coś się popsuje. (rama i robot pokazane w zdjęciach poniżej)
Porusza się on trochę jak czołg, tylko, że zamiast gąsienic ma koła, więc trzyma balans opierając się koszykiem na baterię o podłogę. Można to tak porównać, bo gdy lewe koło kręci się do przodu to skręca w prawo, natomiast, gdy prawe koło kręci się do przodu to skręca w lewo. Oczywiście wiadomo, że gdy oba koła kręcą się do przodu to jedzie do przodu ;)
Mieliśmy już okazję go wykorzystać razem z odbiornikami podczerwieni, aby sterować nim przy użyciu zwykłego pilota do telewizora co widać na jednym ze zdjęć.
Najnowsze dokonanie to możliwość sterowania tym robotem poprzez Wi-Fi. Wykorzystaliśmy możliwości mikrokontrolera do sterowania nim z telefonu, a dokładniej poprzez udostępnienie z telefonu hot-spota z którym łączy się robot. Po połączeniu wystarczy w przeglądarce wpisać lokalny adres IP połączonego robota i wyświetla się prosty interfejs z guzikami do sterowania robotem. Dzięki temu nie trzeba być w zasięgu jakiejkolwiek innej sieci by móc nim sterować, wystarczy żeby robot był w obrębie kilkunastu metrów od telefonu.
Z takimi możliwościami mogliśmy przeprowadzić naszą pierwszą “walkę robotów”, która niespodziewanie zakończyła się odpadnięciem koła jednego z robotów (Widać na załączonym zdjęciu). Wystarczyło tylko włożyć je z powrotem i znów wszystko działało.
Zajęcia będą kontynuowane również w przyszłym roku i mamy nadzieję, że odkryjemy jeszcze więcej pasjonatów robotyki!
Jeśli ciekawi was więcej, to warto się zapoznać z filmem promocyjnym koła: